Application: GridmapNavSimul
1. Description
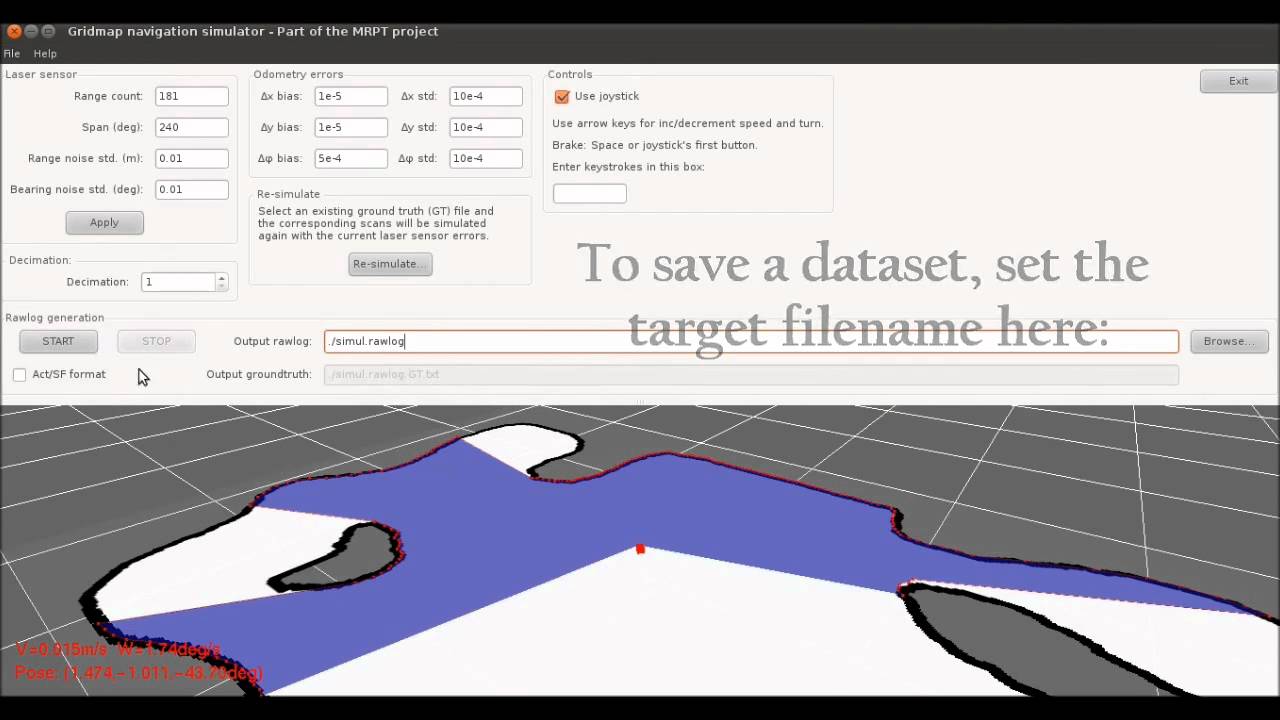
GridmapNavSimul (Grid map navigation simulator) is a GUI program that takes an occupancy gridmap and let you move a robot around simulating a laser scanner. The robot can be guided manually with keystrokes, with a joystick or reproduce a sequence of fixed poses given in a file.
The intention of the program is to save all the sensor data as dataset files: laser scans and odometry. That is, the program is a generator of synthetic robotics data sets.
Both sensors (laser scan & odometry) have configurable levels of noise and different kinds of simulated random errors. This program comes within MRPT packages (Ubuntu users only need to install mrpt-apps from Synaptics), and its source code can be found in MRPT/apps/.
The most relevant C++ classes involved in this program are:
- mrpt::maps::COccupancyGridMap2D: The 2D grid map.
- mrpt::obs::CObservation2DRangeScan: The 2D laser scan observation data.
- mrpt::utils::CRobotSimulator: A very basic 2D robot motion simulator.
2.Video tutorial