Path planning algorithm: TP-RRT (TP-Space RRT)

 Documentation
Documentation

Refer to paper:
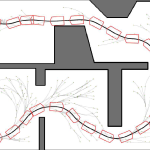
- Jose Luis Blanco, Mauro Bellone and Antonio Gimenez-Fernandez. TP-Space RRT – Kinematic Path Planning of Non-Holonomic Any-Shape Vehicles. Int J Adv Robot Syst, 2015, 12:55. doi: 10.5772/60463. (PDF)
Code reference
See:
- C++ class mrpt::nav::PlannerRRT_SE2_TPS
- Example rrt_planning_example