Example: Bundle Adjustment demo

Description
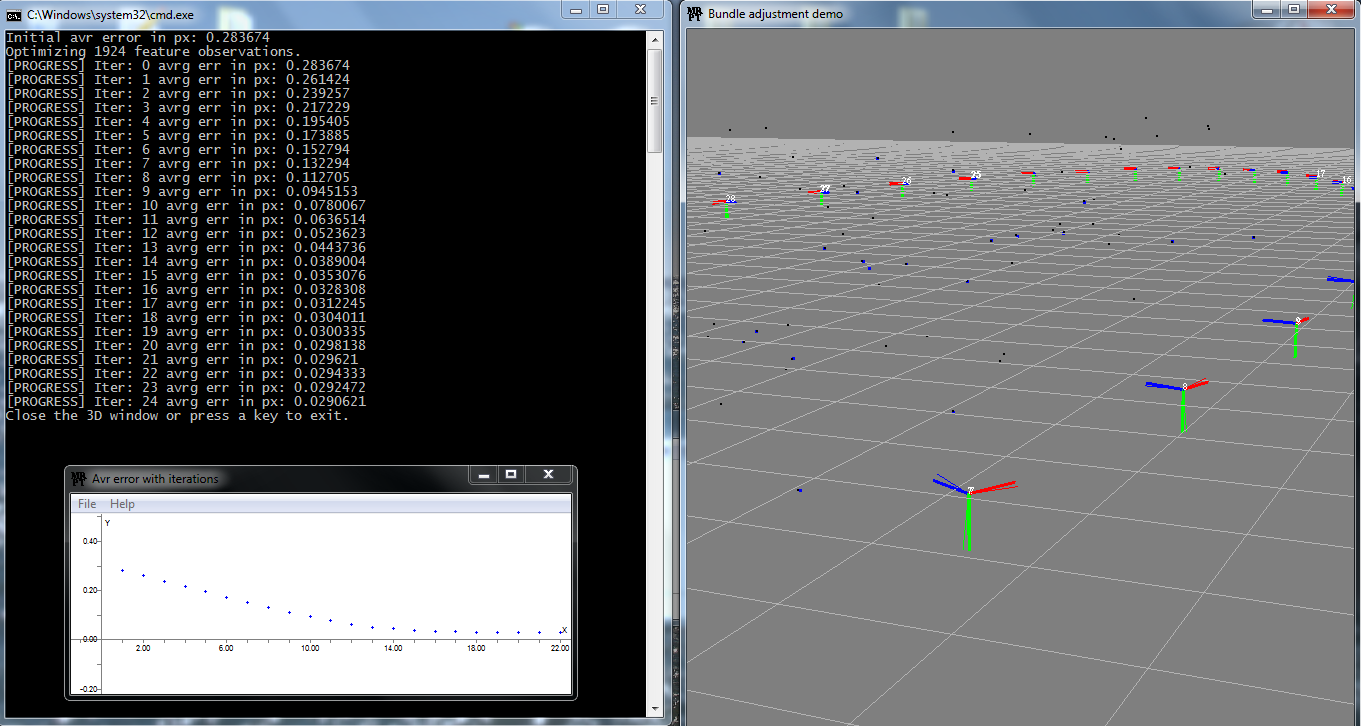
This examples demonstrates the function mrpt::vision::bundle_adj_full with a set of simulated monocular camera observations. See the bundle adjustment module documentation on the C++ API.
Source code
Available here: https://github.com/MRPT/mrpt/tree/master/samples/vision_bundle_adj_example
Screenshot