Example: graph_slam_demo

Contents
1. Description
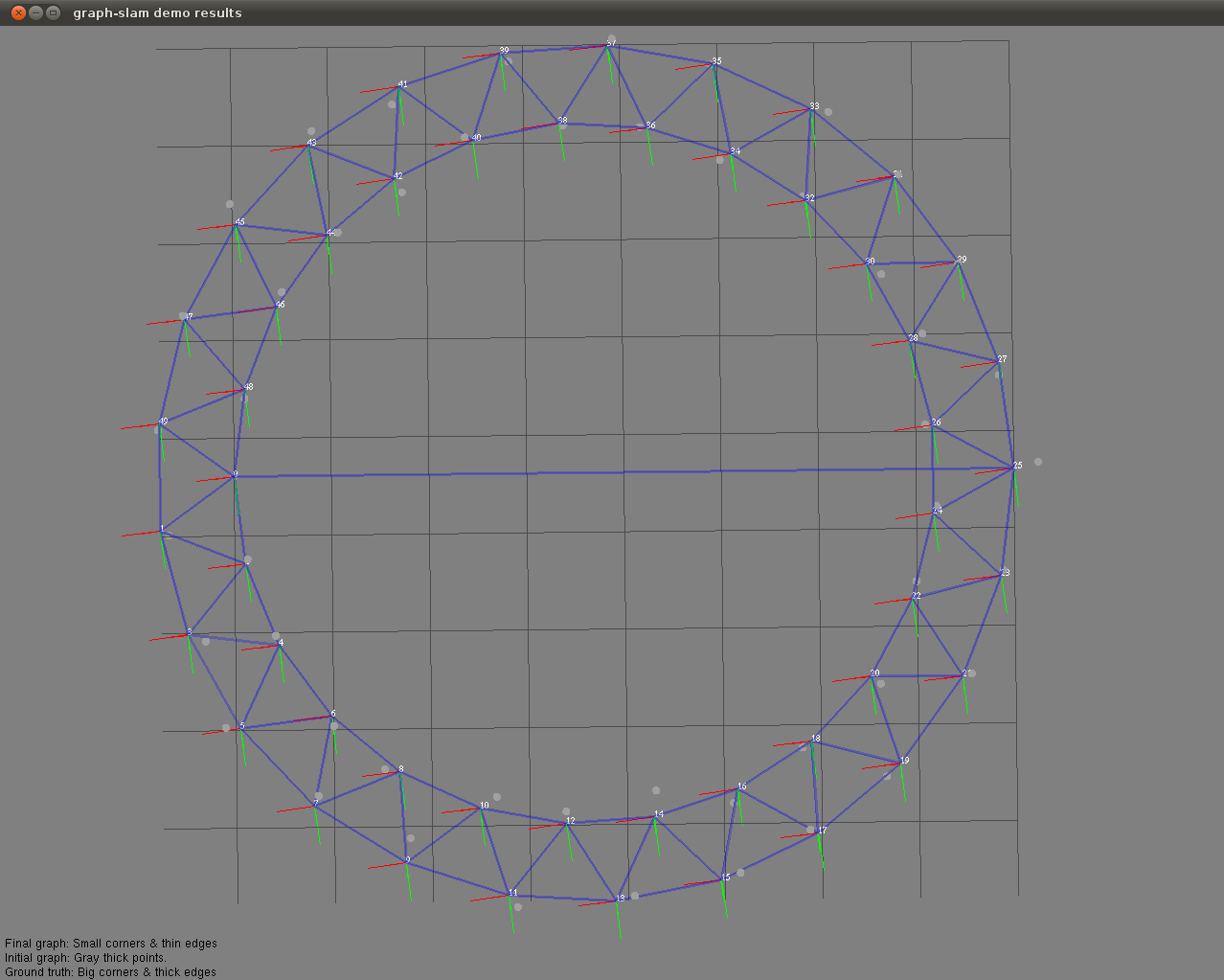
This example, found in the path MRPT/samples/graph_slam_demo, demonstrates:
- the basic construction of a graph of pose constraints,
- the execution of a graph-slam optimization algorithm on it (in order to optimize the global node poses given the information in all the edges and one fixed root node), and
- how to render graphs as MRPT’s OpenGL primitives.
Both 2D or 3D graphs can be generated and optimized, since the example code is templatized.
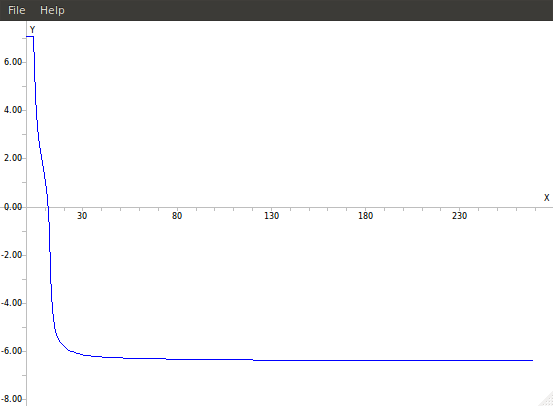
The optimization algorithm is a Sparse Levenberg-Marquartd iterative method, implemented in the template function mrpt::graphslam::optimize_graph_spa_levmarq(), in the library mrpt-graphslam.
2. Example snapshots

3. Complete source code
You can browse the complete C++ source code of this example online.