Paper: Malaga dataset 2009 with 6D ground truth

A Collection of Outdoor Robotic Datasets with centimeter-accuracy Ground Truth, Jose-Luis Blanco, Francisco-Angel Moreno, Javier Gonzalez, Autonomous Robots , 2009 – (Draft PDF) – (Official PDF )
Abstract: The lack of publicly accessible datasets with a reliable ground truth has prevented in the past a fair and coherent comparison of different methods proposed in the mobile robot Simultaneous Localization and Mapping (SLAM) literature. Providing such a ground truth renders specially challenging in the case of visual SLAM, where the world model is 3-dimensional and the robot path is 6-dimensional. This work addresses both the practical and theoretical issues found while building a collection of six outdoor datasets. It is discussed how to estimate the 6-d vehicle path from readings of a set of three Real Time Kinematics (RTK) GPS receivers, as well as the associated uncertainty bounds that can be employed to evaluate the performance of Visual SLAM methods. The vehicle was also equipped with several laser scanners, from which reference point clouds are built as a test-bed for other algorithms such as segmentation or surface fitting. All the datasets, calibration information and associated software tools are available for download.
Erratas (update March 2012):
- Figure 1(b) shows the IMU mounted upside down, while it was actually mounted right-side up. Refer to the pictures at the bottom of this page. Notice that yaw, pitch, roll angles provided in Table 1 are correct (i.e. it was only an issue with the figure).
- Equation (30) in appendix I fails to mention that adding the angles is only a valid approximation for small rotations.
Bibtex:
@ARTICLE{blanco2009cor,
author = {Blanco, Jos{\'e}-Luis and Moreno, Francisco-Angel and Gonz{\'a}lez, Javier},
pages = {327--351},
month = {November},
title = {A Collection of Outdoor Robotic Datasets with centimeter-accuracy Ground Truth},
journal = {Autonomous Robots},
volume = {27},
number = {4},
year = {2009},
issn = {0929-5593},
url = {http://www.mrpt.org/Paper:Malaga_Dataset_2009},
doi = {10.1007/s10514-009-9138-7}
}
Contents
2 Dataset Downloads
| Name of the dataset | Preview | Download |
| CAMPUS-0L |  |
Dataset overview: README Download: malaga2009_campus_0L.zip (1.8 Gb) MD5: 030ddf2d0ac15c836fdfb549823795c3 |
| CAMPUS-2L | 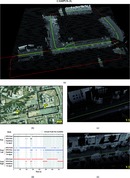 |
Dataset overview: README Download: malaga2009_campus_2L.zip (3.6Gb) MD5: 95aa661466d30c2b845d6c5df58d2e42 |
| CAMPUS-RT |  |
Dataset overview: README Download: malaga2009_campus_RT.zip (1.9Gb) MD5: b2f812b7e722373efa3e5792bb51ab89 |
| PARKING-0L |  |
Dataset overview: README Download: malaga2009_parking_0L.zip (1.3Gb) MD5: 4dfb84412459dc65a130dd75091f8144 |
| PARKING-2L |  |
Dataset overview: README Download: malaga2009_parking_2L.zip (2.1Gb) MD5: 88d54558dd0f00a9df435c99711e3b5a |
| PARKING-6L | 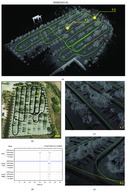 |
Dataset overview: README Download: malaga2009_parking_6L.zip (2.3Gb) MD5: 3273fc6b011dc6395927097ebba0a9c2 |
3 Software
The following MRPT applications have been employed during the elaboration of this article:
- rawlog-grabber: To record all the dataset on the vehicle.
- RawLogViewer: Used to inspect and filter the raw datasets and also to generate the ground-truth estimates. This program can be also directly employed by anyone with the datasets available for download.
MRPT can be downloaded as sources or as binary packages from its Download page.
4 Cameras calibration
This is a set of image pairs which can be used to calibrate the cameras and/or rectify the image pairs:
The 5×8 checkerboard used here has squares of 12×12 cm.

5 Some pictures of the sensors
Click on each image to see full resolution versions:



